
I spent last night re-engineering the 4-seater vehicle. For a number of reasons, I have decided to return to four thinner wheels rather than three wider. Various countries classify any 3-wheeled vehicle as a motorcycle, and thus require helmets; there is a degree of stability inherent in extra wheels, both longitudinally and in terms of cornering grip; the perception of enhanced safety etc.
Total width will remain at circa 1 metre, to take advantage of lane splitting and aerodynamics, with seating for 4. Construction, weight, and various other functional details remain similar.
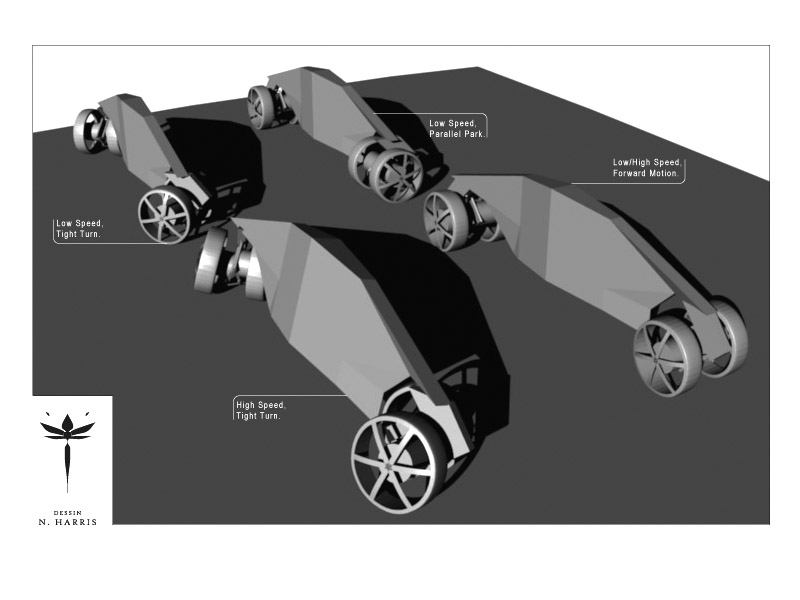
The drivetrain consists of two units, almost like locomotive boogies. At low speeds, the units twist as a whole, both front and rear, to give a very tight turning circle. Either unit can rotate 90 degrees to allow parallel parking to become very simple- a specialised control would be required to switch into this mode.
At higher speeds, the units would continue to rotate on the horizontal plane, however a degree of tilt would be progressively applied via hydraulics. The tilt ratio would be determined in relation to speed, braking etc. by computer. Note also that the correct turning track for each wheel is provided by the differential built into the tilting mechanism- almost like giant skateboard trucks. Each wheel would have an electric motor positioned near the hub. I have avoided true hub-mounted motors as I believe unsprung weight is a real problem here, and they are actually quite impractical. Rather, these motors and their casings would function as the tilting arm attachment points, as well as the mounting point for suspension.
The resulting vehicle would have aerodynamics vastly superior to conventional cars, be just as safe, much, much lighter, more practical in urban areas, and hopefully even more exciting to drive. Efficiency would be excellent if using Li-ion cells.
No comments:
Post a Comment